Tutorial - Open Roberta Stau-Simulation für EV3
Stau ohne Baustelle oder Unfall? Immer wieder kommt es auf Autobahnen plötzlich zu langen Schlangen, die sich genau so plötzlich wieder auflösen. In der Simulation zeigen mit NEPO® programmierte EV3-Roboter, welche Faktoren zu diesem Phänomen beitragen.
Auf Youtube demonstrieren unsere Videos Open Roberta Stau-Simulation und Vollbremser auf vollen Straßen die Open Roberta Simulationen.
Natürlich haben auch vermeintlich grundlose Staus ihre Ursachen: das Brems- und Beschleunigungsverhalten der beteiligten Fahrer gehört wesentlich dazu.
In richtigen Autos detektieren häufig Fahrerassistenzsysteme den Abstand zu Objekten wie vorausfahrenden Autos mit einem Ultraschallsensor. Auch die in der Simulation verwendeten LEGO EV3-Roboter werden mit Ultraschallsensoren ausgestattet, die an der Vorderseite des Roboters angebracht werden.
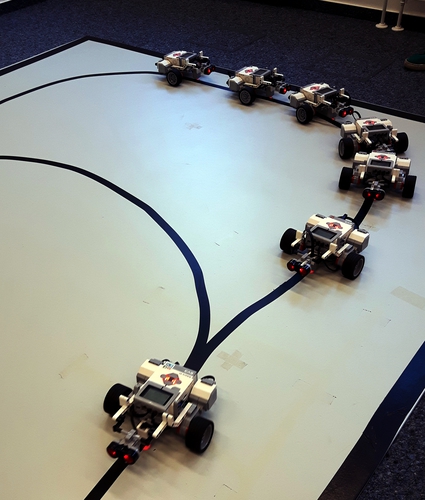
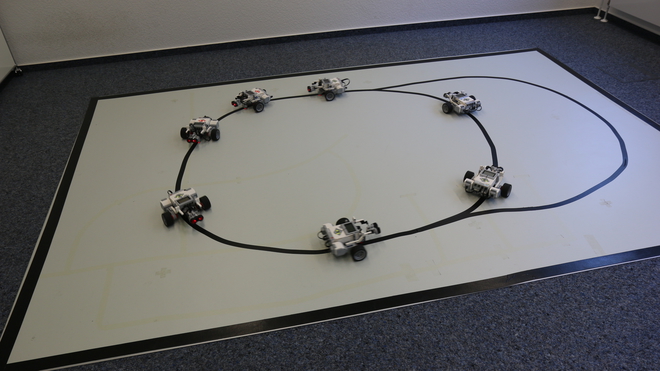
Die Stau-Simulation kann mit dem Open Roberta Lab und LEGO MINDSTORMS EV3-Robotern durchgeführt werden. Das Ziel ist es, die Roboter so zu programmieren, dass sie sich wie Fahrer im Straßenverkehr (allerdings in einem zirkulären Verlauf) verhalten, durch Beschleunigen und Bremsen soll der Verkehr zwischen Stau und fließendem Verlauf variieren und ein bestimmtes Muster zeigen - ganz ohne Einfluss von außen!
In den folgenden Lösungshinweisen wird beschrieben, wie man graduell das Programm aufbaut, bis es die Aufgabe korrekt ausführt. Mit einem passenden Modell kann das Programm also so erarbeitet oder direkt übernommen werden - Sie können das fertige Programm hier herunterladen. Diese Datei kann im Open Roberta Lab hochgeladen und von dort an die Roboter geschickt werden.
Achtung: Die Roboterkonfiguration sollte im Open Roberta Lab kontrolliert und angepasst werden - insbesondere wird der Roboter nur richtig laufen, wenn die Motoren nicht reguliert sind! Auch die Variablen kp und offset sollten angepasst werden. Wie das geht, wird in diesem Tutorial beschrieben.