Debugger & Co: Alle neuen Features in der Übersicht
Anfang September kamen einige tolle Features ins Open Roberta Lab, allen voran die langersehnte »Gruppenfunktion«. Eine weitere Neuerung betrifft die Konfiguration der Mikrocontroller Calliope mini und micro:bit: Im Tab »Roboterkonfiguration« kann man interne wie externe Sensoren und Aktuatoren ab sofort individuell konfigurieren.
Als neue Funktion kam auch der Feedback-Button ins Lab. Damit können Nutzer*innen nicht nur eine Sterne-Bewertung abgeben, sondern auch ihre Wünsche direkt mitteilen.
Zudem wurden Galerie-Filter integriert, welche die Programme in der Galerie nach Hardwaresystem, Programmnamen und Veröffentlichungsdatum sortieren, wodurch sie besser gefunden werden können.
Im Detail: Die neue Gruppenverwaltung im Lab
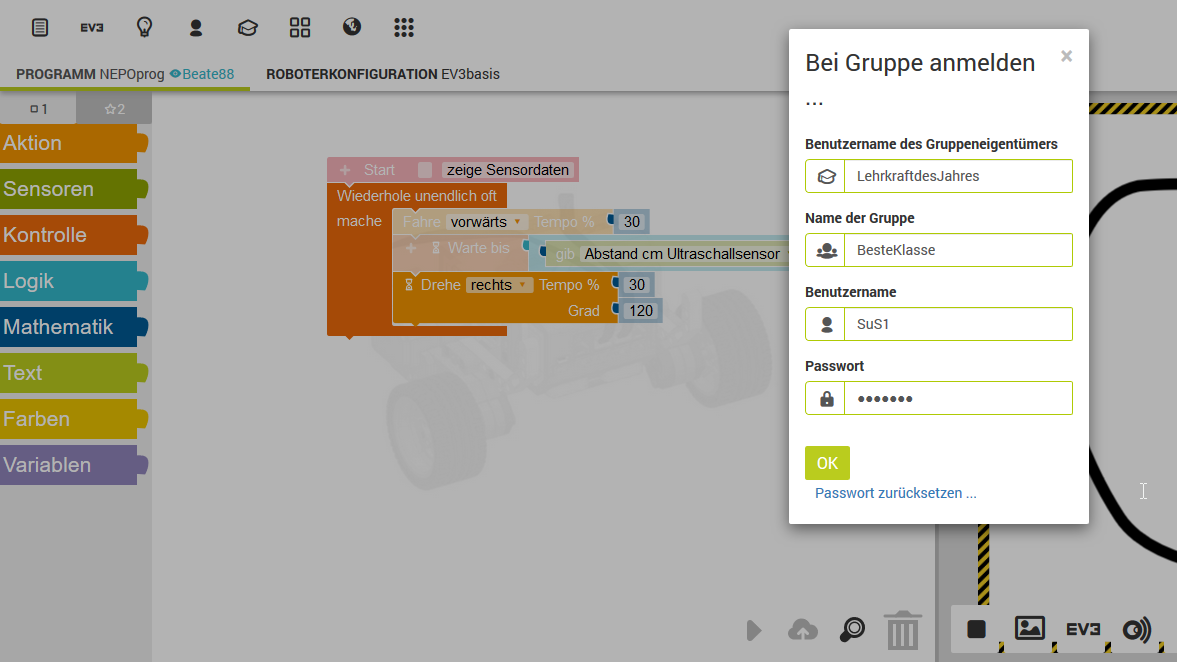
Vielleicht habt Ihr auch darauf gewartet: Im Open Roberta Lab können registrierte Nutzer*innen ab sofort Gruppen erstellen und für die Gruppenmitglieder eigene Konten anlegen. So können z. B. Lehrkräfte auf besonders datensparsame Weise eine Gruppe für ihre Klasse und gleichzeitig Konten für ihre Schüler*innen anlegen. E-Mail-Adressen der Schüler*innen und deren Registrierung im Open Roberta Lab sind dafür nicht notwendig.
Gruppeneigentümer*innen können zudem Programme mit der gesamten Gruppe teilen und alle Programme einsehen, die Gruppenmitglieder programmiert haben.
Mehr Infos zu den Gruppenkonten im WIKI
Kurz erklärt: Die Konfiguration für Calliope mini & Micro:bit
Mit der Konfiguration für den Calliope mini und andere Mikrocontroller können Nutzer*innen ab sofort die verschiedenen Sensoren und Aktuatoren (intern wie extern) individuell konfigurieren, wie z. B. hinzufügen, umbenennen und entfernen.
Sofern externe Sensoren oder Aktuatoren an den Mikrocontroller angeschlossen sind, was z. B. bei der Nutzung des Callibots der Fall ist, müssen diese vor Programmierung in der Konfiguration hinzugefügt werden. Nur so weiß das Lab, welche Sensoren und Aktuatoren zur Programmierung zur Verfügung stehen.
Mehr Infos zu der Konfiguration im WIKI
Programmierfehlern auf der Spur: Der Debugger in der Simulation
Mit dem Debugger-Modus werden die einzelnen Abschnitte eines Programmes schrittweise abgerufen. Das hilft Euch, Fehler in den Programmen schneller zu finden und auszubessern. Der Debugger-Modus steht für jedes Robotiksystem zur Verfügung, der über eine Simulation im Open Roberta Lab verfügt.